実際に遊んでみよう
知育玩具『ころがスイッチ ドラえもん』「ワープキット 」と「ジャンプキット
」と「ジャンプキット 」で遊んでみました。商品名のとおり、ピタゴラスイッチにインスパイアされているようなおもちゃです。
」で遊んでみました。商品名のとおり、ピタゴラスイッチにインスパイアされているようなおもちゃです。

遊んでいるうちにプログラミング的思考が育まれるとのことですが、さてどうでしょうか。
まず箱を開けると、こんな感じになっております。

小さなパーツがけっこうたくさん入っていますね。
まずは附属の「ミッションブック」に従って遊んでみましょう。実際に遊んでみた動画が、こちら。
なかなか夢中になって組んでしまいました。
秘密道具の使い方
さて、実際に遊んでみた経験を踏まえて、秘密道具の使い方を考えてみました。(※あくまでも個人的見解です。)
「ワープキット」附属の秘密道具
■どこでもドア
使い勝手:★★
トラブル:★★
おもしろ:★★★★
コメント:初期設定に一手間かかるところが面倒です。が、下から上にボールを運べる手段は他にないので、重宝します。オリジナルコース設定では要所に設置することになりそうです。
■タイムトンネル
使い勝手:★★★
トラブル:★
おもしろ:★★★★★
コメント:くるくる回ってかなり時間をロスします。別々のコースを走っていた2つ以上のボールを一個所に集約するという、おそらく開発者の意図とは違う使い方ができて、なかなか創造力をかきたてます。
■エスパー帽子
使い勝手:★
トラブル:★★★
おもしろ:★★★
コメント:分岐をコントロールする装置です。このアイテムの使い方次第で、かなり面白いコースづくりができそうな気がします。スタート時にセットするのを忘れると、悲しい結末を迎えます。
■タケコプター
使い勝手:★★★★
トラブル:★★
おもしろ:★
コメント:ボールが通過するとタケコプターが回ります。それだけです。ときどきタケコプターが吹っ飛んでいるのに気がつかないでいたりします。
■もぐら手袋
使い勝手:★★
トラブル:★★★
おもしろ:★★
コメント:装置の挙動はおもしろいのですが、けっこうトラブルが多いアイテムです。ここで止まってしまうときは、ブロックのはまりかたに歪みがあるケースが多い気がします。
「ジャンプキット」附属の秘密道具

■空気砲
使い勝手:★
トラブル:★★★★
おもしろ:★★★
コメント:ボールをジャンプさせる道具ですが、やはり着地が難しいです。思う通りに飛んでくれないことがしばしばあります。ここが頭の使いどころなのでしょう。
■ガリバートンネル
使い勝手:★★
トラブル:★★
おもしろ:★★
コメント:大きな玉になって出てきます。大玉の挙動が面白いので、魅せ場を作れるアイテムです。短距離直線で終わらせるのはもったいない感じがしますね。
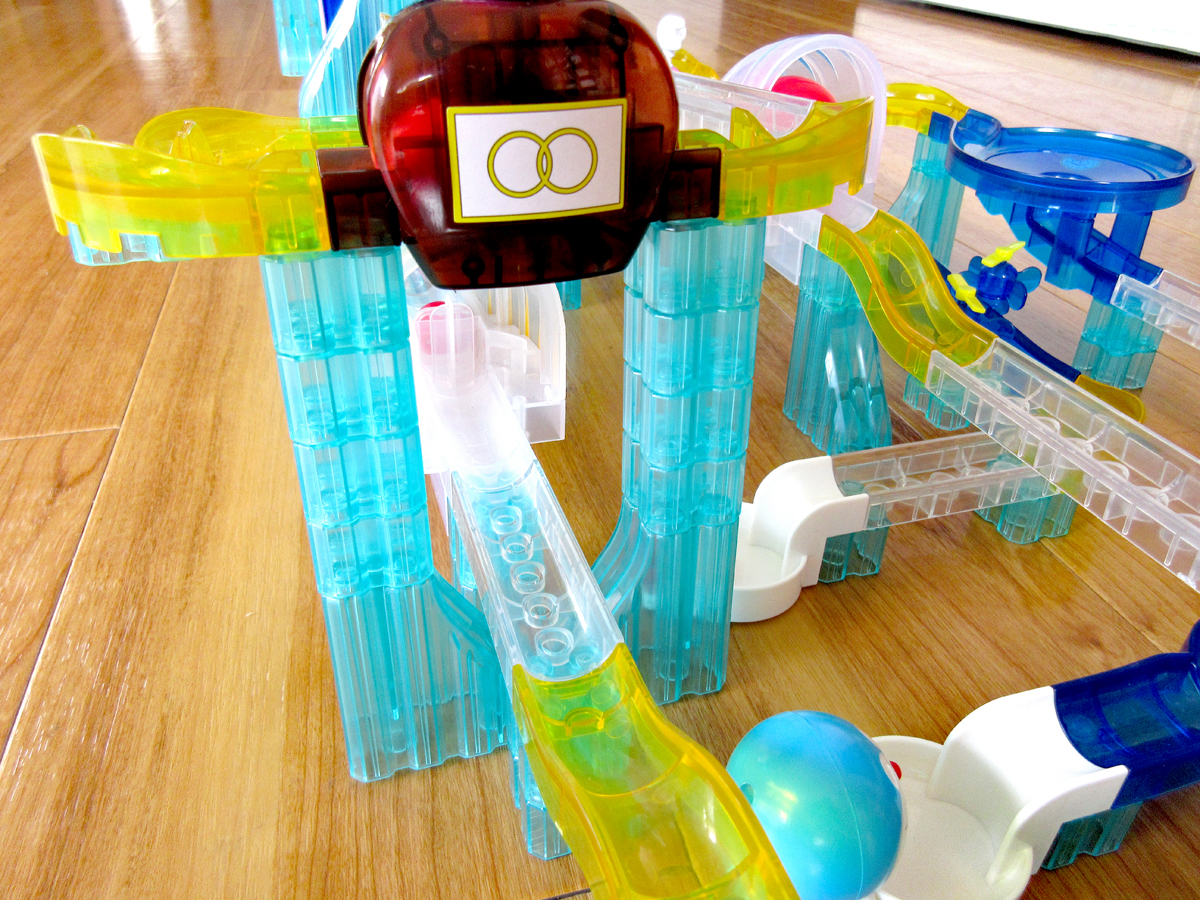
■バイバイン
使い勝手:★
トラブル:★★
おもしろ:★★★★★
コメント:ボールが2つに分裂します。実におもしろいアイテムです。魅力的なオリジナルコースになるかどうかは、この秘密道具の使い方にかかっていそうな気がします。
■時間ナガナガ光線
使い勝手:★★★★
トラブル:★
おもしろ:★
コメント:時間をかけてコースを通過します。それだけです。2つのボールのゴール時間を調整することには使えますが、他に何かおもしろい使い方あるのかなあ。
オリジナルコースを作ろう!
さて、秘密道具の使い方にも慣れたところで、オリジナルコースを作ってみましょう。
今回は、「立体交差」にこだわってコースを作ってみました。実際の挙動はこちらの動画に。
「鈴鹿サーキット」の立体交差が大好きなので、とにかく立体交差をたくさん作りました。立体交差が6個所あります。
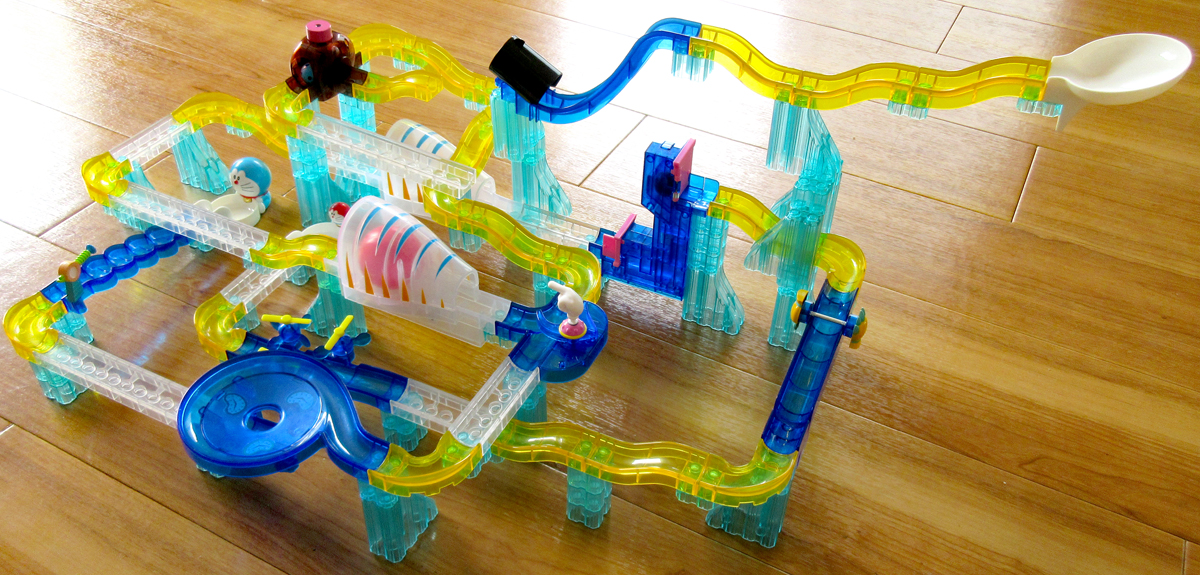
立体公差が多いと、コース全体がコンパクトにまとまりつつ、ボールの挙動がおもしろくなるような気がします。ただ、高さが出るので、コース全体を安定させるためにマニュアルには書いていない独自の工夫が必要になります。
たとえば空気砲を固定させるために、支柱の組み方をアレンジしています。高いコースを支えるためには、ブロックの組み方に工夫を加える必要があります。
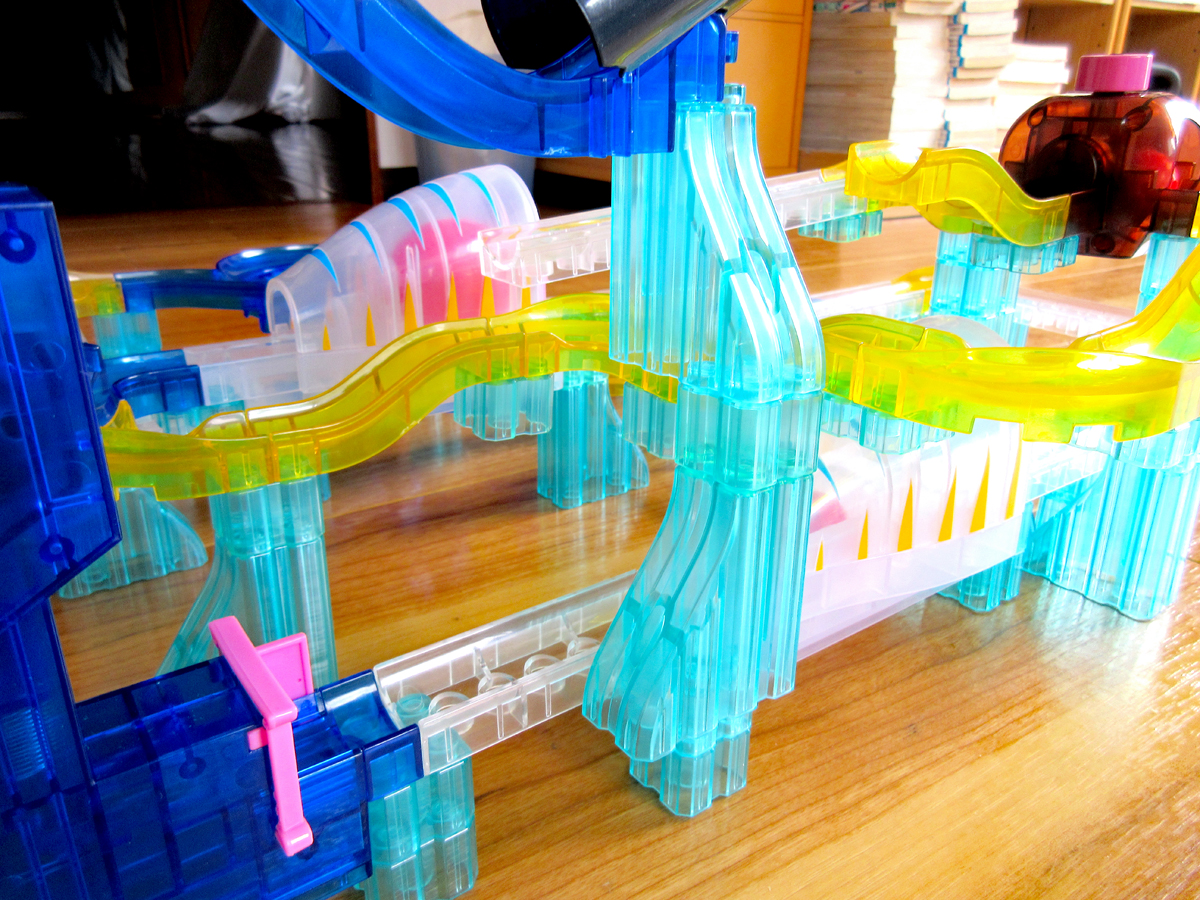
支柱の組み方を工夫した副産物というか。ボールが支柱の間の隙間を通っていくところとか、ちょっとおもしろいかなと思っています。

バイバインを支える支柱の間を大玉が転がっていくところなど、なかなかの魅せ場かなあと思いますが、どうでしょう。
そんなわけで、なかなか夢中になってコースを組んだのでした。
秘密道具の裏技な使い方
いくつかの秘密道具は、おそらく開発者が意図していない使い方ができて、コース編成の自由度を高めます。
たとえば「バイバイン」と「ガリバートンネル」と「どこでもドア」は、普通はスイッチを押す側のボールはスイッチを押した段階で役割終了なのですが、これが跳ね返ってくるのを利用して、コースに戻してしまうという裏技が使えます。これを使うと、ボールが増殖していきます。
次の動画では、実際にボールを3つや4つに増殖させる仕掛けを作っています。
また、タイムトンネルは、ジャンプしたボールなども含め、別のコースを進んできたボールを吸収する受け皿として使えます。
下の動画では、後半のコースで、空気砲でジャンプしたボールをタイムトンネルで受け取っています。
結論
作っている間にもいろいろアイデアが浮かんできます。創造力をかきたてるというキャッチフレーズも、あながち間違っているとは言えなさそうでありました。
晴れた日は砂場で元気に遊ぶとして、雨の日はこういう知育玩具もいいのかもしれません。
【ころがスイッチ ドラえもん】